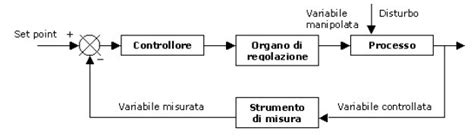
Ogni sistema di controllo automatico nasce con due obiettivi complementari: mantenere una grandezza fisica su un valore desiderato nonostante disturbi (regolazione) e seguire fedelmente un riferimento che varia nel tempo (inseguimento). In entrambi i casi, la grandezza da minimizzare è l’errore, definito come differenza tra ciò che si desidera e ciò che si ottiene. Nel problema di regolazione, il riferimento è tipicamente costante e i disturbi (carichi, rumore, variazioni parametriche) cercano di allontanare l’uscita dal setpoint. Un regolatore efficace deve respingere tali disturbi. Il contributo dell’azione integrale è spesso decisivo: la presenza di almeno un integratore nell’anello di controllo permette di annullare l’errore a regime per ingressi a gradino e disturbi costanti.
Comprendere l'Errore e la sua Minimizzazione
L'errore, matematicamente espresso come $e(t) = r(t) - y(t)$, dove $r(t)$ è il riferimento e $y(t)$ è l'uscita del sistema, rappresenta la deviazione tra lo stato desiderato e quello effettivo. La minimizzazione di questo errore è il fulcro di qualsiasi sistema di controllo. Nei sistemi di regolazione, l'obiettivo primario è mantenere una variabile di processo il più vicino possibile a un valore impostato (setpoint), anche in presenza di perturbazioni esterne che tendono a discostarla da esso. Queste perturbazioni possono manifestarsi sotto forma di variazioni del carico applicato al sistema, rumore introdotto nei sensori, o cambiamenti nelle caratteristiche intrinseche del processo stesso.
Un regolatore ideale dovrebbe possedere la capacità di "respingere" questi disturbi, ovvero di contrastarne l'effetto sull'uscita del sistema in modo rapido ed efficace. Questo significa che, nonostante le perturbazioni, l'uscita dovrebbe rimanere il più possibile vicina al valore di riferimento.
Il Ruolo Cruciale dell'Azione Integrale
L'azione integrale rappresenta uno strumento fondamentale nella cassetta degli attrezzi di un progettista di sistemi di controllo, specialmente quando si affronta il problema del rigetto dei disturbi costanti e dell'inseguimento di riferimenti a gradino. La presenza di un integratore all'interno dell'anello di controllo conferisce al sistema la proprietà di annullare l'errore a regime.
Consideriamo un ingresso a gradino, ovvero un riferimento che passa istantaneamente da un valore a un altro e vi rimane costante. Senza un'azione integrale, un sistema di controllo potrebbe raggiungere uno stato stazionario con un errore residuo, specialmente se sono presenti disturbi costanti. L'integratore, invece, accumula l'errore nel tempo. Se l'errore è diverso da zero, l'uscita dell'integratore continuerà a cambiare, modificando di conseguenza l'azione di controllo. Questo processo continua finché l'errore non viene annullato, momento in cui l'uscita dell'integratore si stabilizza. Di conseguenza, per ingressi a gradino e disturbi costanti, l'integrazione assicura che l'errore a regime sia nullo.
Inseguimento di Riferimenti Variabili: Oltre l'Errore a Regime
Nel contesto dell'inseguimento, il riferimento non è più statico, ma evolve nel tempo secondo profili specifici. Questi possono variare da una semplice rampa, a una funzione sinusoidale, fino a traiettorie complesse definite in applicazioni specifiche. In questi scenari, la minimizzazione dell'errore a regime non è l'unico parametro di interesse. La "fedeltà del percorso" diventa un aspetto critico.
La fedeltà del percorso si riferisce a quanto accuratamente l'uscita del sistema replica la forma del riferimento nel tempo. Diversi fattori possono degradare questa fedeltà:
- Ritardi: Il sistema impiega del tempo per rispondere alle variazioni del riferimento.
- Ritocchi (Overshoot): L'uscita supera il valore del riferimento prima di stabilizzarsi, oscillando attorno ad esso.
- Overshoot: Simile al ritocco, indica il superamento del valore finale desiderato.
Questi fenomeni non solo indicano una minore precisione nell'inseguimento, ma possono anche avere implicazioni negative sulla stabilità e sulla robustezza del sistema.
Prestazioni Dinamiche: Quantificare la Risposta del Sistema
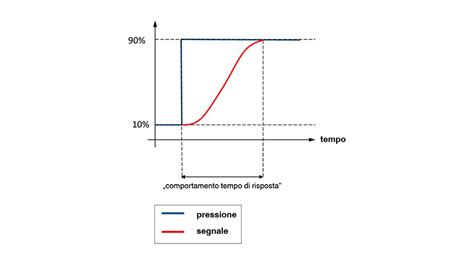
Le prestazioni dinamiche forniscono una metrica quantitativa per descrivere come l'uscita di un sistema transita da uno stato all'altro. Due indicatori chiave sono il tempo di salita e il tempo di assestamento.
Tempo di Salita ($T_r$): Definisce l'intervallo di tempo necessario affinché l'uscita del sistema passi da una frazione bassa a una frazione alta del suo valore finale. Ad esempio, si può considerare il tempo necessario per passare dal 10% al 90% del valore finale. Un tempo di salita ridotto indica una risposta più rapida del sistema.
Tempo di Assestamento ($T_s$): Rappresenta il tempo richiesto affinché l'uscita entri e rimanga entro una predefinita banda di tolleranza attorno al suo valore finale. Una banda di tolleranza comune è il 2% o il 5% del valore finale. Un tempo di assestamento ridotto indica che il sistema raggiunge rapidamente uno stato stabile.
Per i sistemi dominati da una dinamica del secondo ordine, le prestazioni dinamiche come il tempo di salita e il tempo di assestamento sono strettamente legate alla coppia di parametri: il rapporto di smorzamento ($\zeta$) e la frequenza naturale ($\omegan$). La funzione di trasferimento di riferimento per un sistema del secondo ordine presenta un denominatore della forma $s^2 + 2\zeta\omegan s + \omega_n^2$.
- Rapporto di Smorzamento ($\zeta$): Determina la rapidità con cui le oscillazioni decadono. Valori di $\zeta < 1$ indicano un sistema sottosmorzato (con oscillazioni), $\zeta = 1$ un sistema criticamente smorzato (risposta più rapida senza oscillazioni), e $\zeta > 1$ un sistema sovrasmorzato (risposta lenta).
- Frequenza Naturale ($\omega_n$): Rappresenta la frequenza alla quale il sistema oscillerebbe se non fosse smorzato.
Valori piccoli di $\zeta$ alle basse frequenze indicano una buona capacità di rigetto dei disturbi e un piccolo errore a regime. D'altra parte, una $\omega_n$ contenuta alle alte frequenze è desiderabile per limitare l'amplificazione del rumore di misura, che può influenzare negativamente le prestazioni del controllo.
Architetture di Controllo: P, PI, PID e Retroazione di Stato
La scelta dell'architettura del controllore è fondamentale per ottenere le prestazioni desiderate. Tra le più comuni troviamo:
Controllore Proporzionale (P): L'azione di controllo è direttamente proporzionale all'errore. Un controllore P può ridurre l'errore a regime, ma introduce un compromesso tra la rapidità di risposta e la stabilità del sistema. Spesso, per ottenere una risposta più rapida, si sacrifica la stabilità, e viceversa.
Controllore Proporzionale-Integrale (PI): Aggiunge l'azione integrale all'azione proporzionale. Come discusso in precedenza, l'azione I è cruciale per azzerare l'errore a regime in presenza di ingressi a gradino e disturbi costanti.
Controllore Proporzionale-Integrale-Derivativo (PID): Incorpora anche un'azione derivativa. L'azione D anticipa la dinamica del sistema basandosi sulla velocità di variazione dell'errore. Può contribuire a ridurre l'overshoot e migliorare la stabilità, ma è sensibile al rumore di misura.
- Retroazione di Stato e Osservatori: Per sistemi più complessi, specialmente quelli descritti in forma nello spazio degli stati, si può ricorrere alla retroazione di stato. Questo approccio consente di manipolare direttamente gli stati interni del sistema. Il posizionamento dei poli permette di impostare in modo preciso le caratteristiche desiderate della risposta del sistema, come il tempo di salita e lo smorzamento. Tuttavia, gli stati interni non sono sempre misurabili direttamente. In questi casi, si utilizzano gli osservatori (come il filtro di Kalman o osservatori di Luenberger) per stimare gli stati non misurabili a partire dalle misure disponibili. Un osservatore di Luenberger, ad esempio, genera una stima degli stati del sistema basandosi sul modello del sistema e sulla differenza tra l'uscita misurata e quella stimata.
Robustezza e Gestione delle Incertezze
Prestazioni eccellenti ottenute su un modello nominale del sistema possono degradare significativamente in presenza di incertezze nel modello stesso. Le incertezze possono derivare da variazioni parametriche del processo, non linearità non modellate, o errori nella stima dei parametri.
Per garantire la robustezza del sistema di controllo, ovvero la sua capacità di mantenere prestazioni accettabili anche in presenza di incertezze, è essenziale considerare diversi aspetti nella progettazione:
- Margini di Guadagno e Fase: Questi margini quantificano la tolleranza del sistema a variazioni di guadagno e fase nel loop di retroazione prima che diventi instabile. Margini adeguati sono indicatori di robustezza.
- Disaccoppiamento Bassa/Alta Frequenza: Un'attenta progettazione del controllore può mirare a disaccoppiare le prestazioni a bassa frequenza (legate alla regolazione e all'inseguimento di segnali lenti) da quelle ad alta frequenza (legate alla reiezione del rumore e alla stabilità).
Affrontare la Saturazione degli Attuatori e il Rumore
La realtà operativa dei sistemi di controllo presenta spesso sfide pratiche che richiedono soluzioni specifiche:
- Saturazione degli Attuatori: Gli attuatori (motori, valvole, ecc.) hanno limiti fisici sulla loro uscita. Quando il comando di controllo supera questi limiti, l'attuatore satura, impedendo al sistema di rispondere come comandato. Questo fenomeno può indurre un effetto indesiderato chiamato "wind-up dell'integratore". Se l'errore persiste e l'integratore continua ad accumulare, una volta che l'attuatore torna nel suo range operativo, l'integratore avrà un valore elevato che richiederà tempo per scaricarsi, causando un ritardo nella risposta. Per mitigare questo problema, si utilizzano schemi di "anti-windup", che limitano l'integrazione quando l'attuatore è saturato.
Che cosa è l'Anti Windup in un controller PID?
- Filtri Passa-Basso: Il rumore presente nelle misure del sensore può essere amplificato dal controllore, specialmente dalle azioni proporzionale e derivativa. Per contenere l'effetto del rumore, è prassi comune applicare filtri passa-basso sia all'anello di misura (sulla grandezza misurata) sia all'azione derivativa del controllore. Questi filtri attenuano le componenti ad alta frequenza del segnale, che sono spesso associate al rumore, senza degradare eccessivamente le prestazioni a bassa frequenza.
L'Ottimizzazione del Riferimento: Il Ruolo del Pre-Filtro
Sebbene la struttura del controllore sia primaria, anche la forma del riferimento stesso può essere ottimizzata per migliorare le prestazioni. L'uso di un pre-filtro sul riferimento, ad esempio, può modellare il profilo di ingresso in modo da renderlo più "gradito" al sistema di controllo. Un pre-filtro può smussare i transitori bruschi nel riferimento, riducendo la sollecitazione sull'attuatore e potenzialmente migliorando la fedeltà dell'inseguimento e riducendo l'overshoot.
Un Approccio Integrato: Regolazione e Inseguimento come Facce della Stessa Medaglia
In definitiva, la regolazione e l'inseguimento non sono problemi distinti, ma piuttosto due manifestazioni della stessa necessità fondamentale: minimizzare l'errore in modo rapido, stabile e robusto. La progettazione di un sistema di controllo efficace richiede un approccio olistico che consideri:
- La Struttura del Controllore: La scelta tra P, PI, PID, o approcci basati sullo spazio degli stati.
- La Banda di Guadagno: Determinata dalla frequenza alla quale il loop di controllo ha un guadagno unitario, influenza la velocità di risposta.
- La Sensibilità: La sensibilità del sistema ai disturbi e alle incertezze.
Agendo su questi elementi, è possibile modellare le prestazioni dinamiche chiave come il tempo di salita, l'overshoot, il tempo di assestamento e l'errore a regime. L'obiettivo finale è trovare il miglior compromesso possibile tra questi fattori, in funzione delle specifiche esigenze e dei vincoli dell'applicazione particolare.
La capacità di un sistema di controllo di rigettare efficacemente i disturbi a gradino è una pietra miliare per la sua utilità pratica. L'integrazione di azioni proporzionali, integrali e, se necessario, derivativi, unitamente a tecniche avanzate come la retroazione di stato e la gestione delle incertezze, consente di ottenere sistemi di controllo performanti e affidabili in una vasta gamma di settori industriali e tecnologici.
tags: #controllore #reiezione #disturbo #gradino