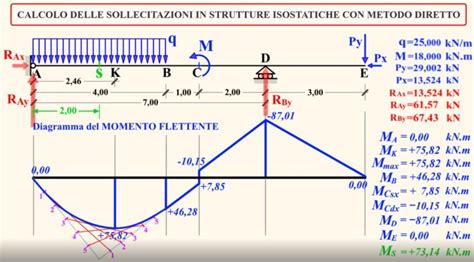
La risoluzione manuale di un telaio piano, specialmente durante il percorso di studi universitari, può rivelarsi un'impresa laboriosa e complessa. Ogni schema strutturale, a seconda della connessione delle aste e dei vincoli esterni applicati, richiede un sistema di equazioni specifico. Non esiste una formula generica di risoluzione; per ogni schema è necessario riscrivere tutte le equazioni risolventi, applicando il metodo più adatto al caso specifico, sia esso il Metodo delle Forze, il Metodo degli Spostamenti o il Principio dei Lavori Virtuali. Ma come fanno i moderni software di calcolo ad essere in grado di risolvere qualsiasi configurazione strutturale? La risposta risiede nel concetto di "calcolo automatico delle strutture", un algoritmo generico di risoluzione che sta alla base di ogni strumento di ingegneria strutturale digitale.
Dalla Modellazione Concettuale alla Rappresentazione Matriciale
Con l'acquisizione dei crediti formativi del corso, lo studente acquisisce una profonda conoscenza dei metodi di calcolo delle strutture orientati all'elaborazione automatica. Questo percorso didattico si focalizza sugli aspetti concettuali, formali e operativi, fornendo le basi per comprendere cosa accade effettivamente quando si clicca sul pulsante "Risolvi" in un software di calcolo. L'algoritmo generico di risoluzione, infatti, elabora i dati forniti in input per calcolare la soluzione del problema statico. Conoscere i principi del calcolo automatico delle strutture non solo chiarisce il funzionamento interno di questi potenti strumenti, ma aiuta anche a ottimizzare i modelli di calcolo e a interpretare correttamente eventuali anomalie dei risultati. Questo articolo è pensato per chiunque, dal progettista strutturale esperto allo studente universitario, si confronti con calcoli strutturali e software di calcolo.
Il modello tridimensionale che osserviamo sui nostri schermi non è altro che una rappresentazione di un insieme di numeri organizzati in matrici. Il cuore di questo processo è la "matrice di rigidezza del sistema strutturale". Per comprendere appieno questo concetto, partiamo dall'elemento più semplice: una molla. Per uno schema semplice di molla, l'unico grado di libertà è lo spostamento verticale della sua estremità. La rigidezza della molla è descritta da un singolo parametro: la sua costante elastica, k. Il calcolo degli spostamenti incogniti di una struttura spaziale per carichi assegnati è, tuttavia, decisamente più complesso rispetto al sistema semplice di una molla.
Cos'è un software? Scoprilo in 6 minuti!
La Matrice di Rigidezza dell'Elemento e la sua Trasformazione
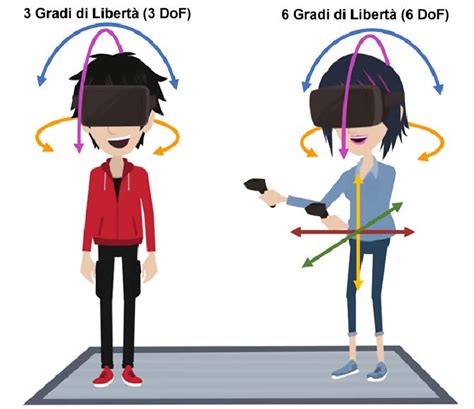
Ogni elemento asta di uno schema statico possiede una propria matrice di rigidezza, definita nel suo sistema di riferimento locale. Per uno schema statico piano, ciascun nodo di estremità dell'asta avrà 3 gradi di libertà (traslazione lungo X, traslazione lungo Y e rotazione attorno a Z). Di conseguenza, la dimensione della matrice di rigidezza dell'asta sarà 3 g.d.l. per 3 g.d.l. Per uno schema statico spaziale, invece, ciascun nodo di estremità dell'asta avrà 6 gradi di libertà (3 traslazioni lungo X, Y, Z e 3 rotazioni attorno a X, Y, Z), portando la dimensione della matrice di rigidezza locale a 6x6.
La matrice di rigidezza locale è valida nel sistema di riferimento locale dell'asta. Questo sistema di riferimento ha la sua origine in un nodo dell'asta, con l'asse X' parallelo all'asse dell'asta stessa e gli assi Y' e Z' ortogonali a tale asse. Per passare dal sistema di riferimento locale a quello globale (o viceversa), si utilizza una "matrice di trasformazione". Questa matrice è quadrata e la sua dimensione è pari alla dimensione della matrice di rigidezza dell'asta.
Assemblaggio della Matrice di Rigidezza Globale
Il processo di calcolo automatico delle strutture non si ferma alla definizione delle matrici di rigidezza dei singoli elementi. Il passo successivo consiste nell'assemblare queste matrici locali in un'unica "matrice di rigidezza globale" che rappresenta l'intero sistema strutturale. Per fare ciò, è fondamentale considerare i nodi della struttura a cui sono connesse le singole aste. Ogni matrice di rigidezza dell'asta può essere suddivisa in quattro sottomatrici di dimensione 3x3 (nel caso piano) o 6x6 (nel caso spaziale).
Consideriamo un esempio per chiarire questo concetto. In uno schema statico piano composto da 4 nodi, la matrice di rigidezza globale avrà una dimensione pari a 3 g.d.l. (traslazione X, Y e rotazione attorno a Z) moltiplicata per il numero di nodi, ovvero 12x12. Ogni gruppo di 3 righe e 3 colonne (o 6 righe e 6 colonne nel caso spaziale) della matrice di rigidezza globale individua un nodo specifico della struttura. Questo procedimento di assemblaggio viene ripetuto per tutte le aste che compongono lo schema statico. In sostanza, quando creiamo le aste del modello in un software di calcolo strutturale e le connettiamo ai nodi, stiamo fornendo all'algoritmo le istruzioni necessarie per la costruzione della matrice di rigidezza globale del sistema.
Applicazione dei Vincoli Esterni ed Interni
I vincoli esterni, come appoggi fissi, carrelli o incerniere, sono fondamentali per definire il comportamento di una struttura e per garantirne la stabilità. Nel contesto del calcolo matriciale, l'applicazione di un vincolo si traduce nella modifica della matrice di rigidezza globale. Ad esempio, se nel nodo 1 viene applicato un appoggio fisso, le traslazioni lungo X e Y di quel nodo saranno impedite. Questo viene gestito matematicamente attraverso opportune operazioni sulla matrice di rigidezza.
La Soluzione del Sistema: Inversione della Matrice e Vettore dei Carichi
Una volta assemblata la matrice di rigidezza globale e applicati i vincoli, il sistema è pronto per essere risolto. Per ottenere la soluzione del problema statico, ovvero gli spostamenti incogniti di ogni nodo, è necessario calcolare l'inversa della matrice di rigidezza del sistema strutturale. L'algoritmo per il calcolo della matrice inversa, come l'algoritmo di Gauss-Jordan, è piuttosto complesso e computazionalmente intensivo. Il calcolo della matrice inversa è anche una sorta di "prova del nove" per verificare la corretta applicazione di tutti i vincoli esterni ed interni.
Parallelamente, tutti i carichi esterni applicati allo schema statico vengono organizzati in un "vettore dei carichi nodali". È importante notare che anche i carichi distribuiti applicati alle aste vengono equivalentemente trasformati in forze nodali concentrate, in modo da poter essere gestiti all'interno dello stesso sistema matriciale.
La relazione fondamentale che lega rigidezza, spostamenti e carichi è espressa dalla formula matriciale:
K * U = F
Dove:
- K è la matrice di rigidezza globale del sistema strutturale.
- U è il vettore degli spostamenti nodali incogniti (traslazioni e rotazioni).
- F è il vettore dei carichi nodali applicati.
Per trovare il vettore degli spostamenti U, è necessario risolvere questa equazione matriciale. Matematicamente, questo si ottiene moltiplicando entrambi i membri per l'inversa della matrice di rigidezza K⁻¹:
U = K⁻¹ * F
Determinazione delle Sollecitazioni e degli Spostamenti Locali
Una volta noti gli spostamenti nodali U dall'intero sistema, il passo successivo è quello di calcolare le sollecitazioni (forze assiali, tagli, momenti flettenti) e gli spostamenti specifici di ciascuna asta del modello. Dal vettore degli spostamenti nodali U, vengono estratti gli spostamenti dei nodi di estremità di ciascuna asta. Questi spostamenti, inizialmente espressi nel sistema di riferimento globale, vengono poi convertiti nel sistema di riferimento locale dell'asta utilizzando la matrice di trasformazione precedentemente definita.
Conoscendo gli spostamenti locali di un'asta e la sua matrice di rigidezza locale, è possibile determinare le sollecitazioni interne all'asta stessa. Questo completa il processo di analisi statica, fornendo una visione completa del comportamento della struttura sotto l'azione dei carichi applicati.
Considerazioni sulla Modellazione e sull'Ottimizzazione
Un aspetto cruciale nel calcolo automatico delle strutture è la modellazione. La suddivisione e la rappresentazione della struttura in elementi finiti, siano essi travi, lastre piane, lastre inflesse (alla Mindlin o alla Kirchhoff) o solidi tridimensionali, influenzano direttamente la precisione e l'efficienza del calcolo. Esistono vari tipi e famiglie di elementi finiti, ciascuno con le proprie caratteristiche e ambiti di applicazione.
La scelta del modello e la sua discretizzazione hanno implicazioni dirette sulla dimensione della matrice di rigidezza globale. Minore sarà il numero di nodi e elementi nel modello, minore sarà la dimensione della matrice di rigidezza e, di conseguenza, minore sarà il tempo richiesto per la risoluzione. Un modello più raffinato (con più nodi e elementi) porterà a risultati più precisi, ma richiederà maggiori risorse computazionali. Trovare il giusto equilibrio tra accuratezza e efficienza è una delle sfide chiave nella progettazione strutturale assistita da computer.
Oltre l'Analisi Statica Lineare
Il calcolo automatico delle strutture non si limita all'analisi statica lineare. Il corso menzionato nel materiale fornito copre anche argomenti avanzati come:
- Analisi statica non lineare: Questa analisi considera le non linearità geometriche (grandi spostamenti) e meccaniche (comportamento del materiale oltre il limite elastico, plasticizzazione). La modellazione per elementi finiti in questo ambito richiede strategie di analisi e algoritmi di risoluzione specifici, spesso iterativi.
- Analisi dinamica lineare e non lineare: Queste analisi studiano il comportamento delle strutture sotto carichi variabili nel tempo, come sismi o vento. L'analisi modale (determinazione delle frequenze naturali e dei modi di vibrare) e l'analisi al passo (integrazione delle equazioni del moto nel tempo) sono strumenti fondamentali in questo contesto. I metodi di integrazione nel tempo, come l'integrazione di Newmark o di Wilson, sono essenziali per risolvere le equazioni del moto.
Questi argomenti, sebbene più complessi, si basano sui principi fondamentali del calcolo matriciale e degli elementi finiti, estendendo la potenza degli algoritmi automatici a scenari di carico più realistici e complessi.
La verifica dell'apprendimento di questi concetti avviene tipicamente attraverso una prova orale, volta ad accertare la padronanza dei concetti chiave illustrati durante le lezioni e sviluppati nelle esercitazioni. Il superamento dell'esame è garantito agli studenti che dimostrano una solida comprensione di questi principi fondamentali.